Real Time Kinetic (RTK) location uses the same satellites we use in other GPS applications, such as smart phones or car navigation, but incorporates correction information from a stationary base station to remove errors and provide a location that is within 1 or 2 centimeters of the true location. For comparison, typical GPS receivers are accurate to within 1 to 3 meters.
When we use the term “GPS” we usually mean several different Global Navigation Satellite System (GNSS) satellite constellations. The Global Positioning System (GPS) was the first satellite based location system started by the United States in the late 1970s with new generations of satellites added ever since. Since then the European Union has launched the Galileo system starting in the mid-2000s with most satellites operational since the mid-2010s. The Russian GLOSNASS and Chinese BeiDou systems are also GNSS constellations. GNSS receivers may work with some or all of these constellations and some or all satellites within the constellations, since constellations include satellites that broadcast on different frequencies, or bands.
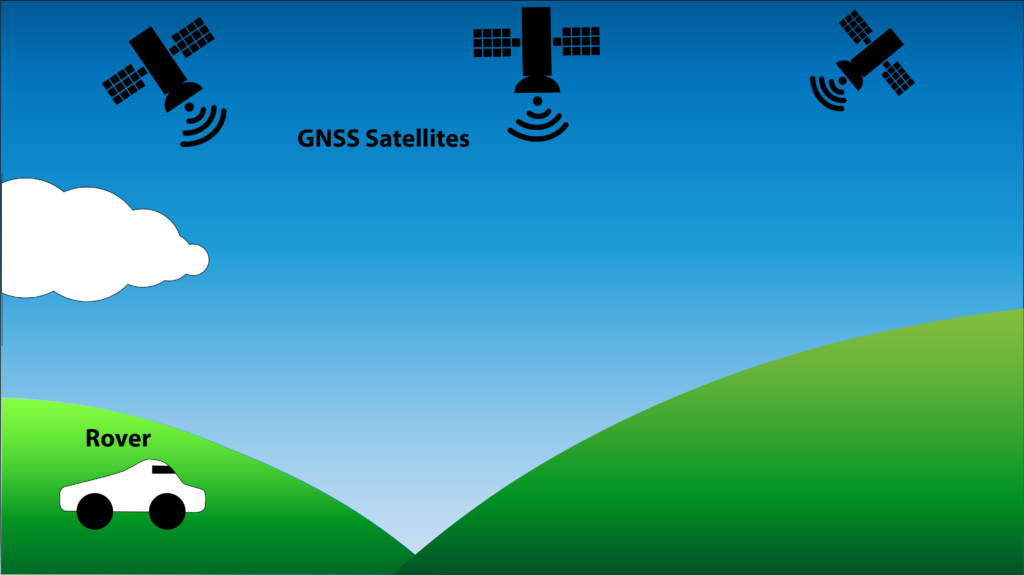
In the diagram below a rover with a GNSS receiver receives signals from multiple GNSS satellites and computes its position on the Earth based on those signals. Four satellites are required to fix your location, with more satellites providing more accuracy.
RTK systems add another GNSS receiver at a fixed location which provides correction data to the rover. This is referred to as a base station. Software onboard the rover, often inside the GNSS receiver, processes the correction data from the base station and is able to correct for delays in the GNSS signal through the ionsophere and troposphere, as well as multi-path, satellite clock, and ephemeris (knowledge of a satellite’s orbit) errors. Inexpensive and simple RTK systems are made possible by receivers that have incorporated RTK calculations into their hardware. The ublox ZED-F9P is one common example. The SkyTraq line of receivers used in our products are similarly capable and lower priced options, making RTK receivers affordable for even more applications.
To compute valid corrections, signals traveling to a base station must experience similar atmospheric conditions as those traveling to the rover. The rover and the base station must also have some of the same satellites in view. Therefore, the base station must be near the rover for RTK solutions to be accurate. The accuracy of the corrections degrades smoothly with distance, so there is not a hard cut off where corrections stop working, but a rule of thumb is that the base station and the rover need to be within 20 km of each other for the most accurate solution.
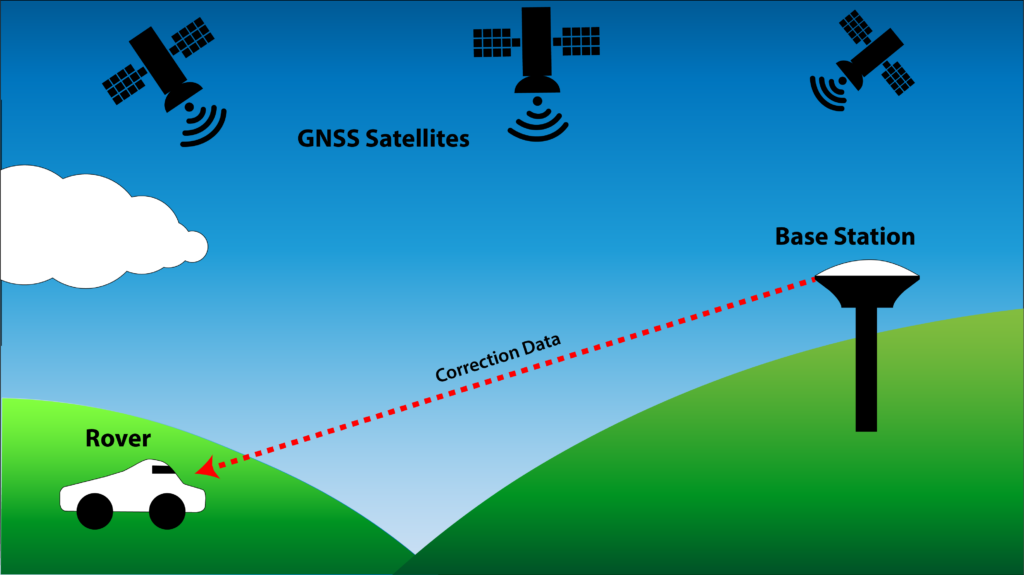
The diagram below shows an RTK system with a base station and a rover both receiving signals from GNSS satellites. The base station sends the correction data to the rover.
Correction data in an RTK system can come from your own base station, a publicly available data stream from a nearby base station, or by paying a subscription fee to access private data. If you operate your own base station it consists of a GNSS receiver capable of calculating correction data and a method to transmit that data. One transmission method is a serial modem for transmitting up to several hundred meters in a suburban environment or several kilometers in an open environment. A second method involves transmitting the correction data over a WiFi network to a service on either your local network or the internet, this works well if your rover and base station have WiFi connectivity. A third option involves using a cellar modem to transmit and/or receive data from a source on the internet (your own, public, or private). Depending on your application, you may mix and match options two and three, for example your base station may have WiFi connection, but your rover does not, so your base station could use a WiFi radio and your rover and cellular modem. More detail is available on our How to Send RTK Corrections page.
Unlike typical GNSS solutions, RTK solutions require large numbers of visible satellites with high signal to noise ratios on the satellite signals to effectively compute and use corrections. This means that RTK is only a viable option for outdoor applications with a reasonably clear view of the sky.